Raw input representation
課程先從real data著手,用的是郵遞區號碼辨識的application。以下是一個16x16 pixel的數字影像:

256 pixel,可以用256-vector來表現input vector:
如果用perceptron linear model的話,事實上要找出256-weight vector + bias w0:

這是huge weight vector,計算量可能難以實現。
以上是把每個pixel value都當作input vector一部分,所以稱為raw input,事實上我們要選出某些代表性的feature來當作input vector,這樣才能簡化計算量。
Feature vector
例如intensity: 黑色部分佔比可能暗示不同數字
symmetry: 這的確是有分類意義
我們縮減出3-vector (including x0 for bias):
所以Perceptron model 也只有3d vector weights:
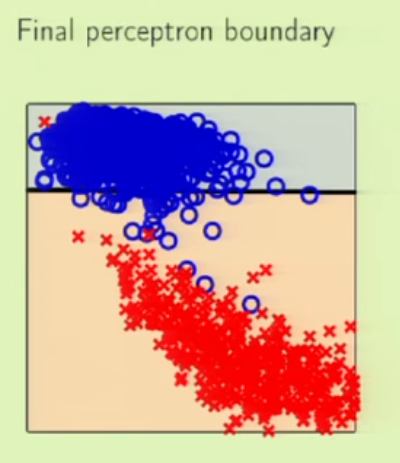
如果把兩個數字(1 , 5 )畫在2d feature (x軸intensity, y軸symmetry) 座標上,可以發現這兩個數字是可以almost畫出一條直線分開的:

PLA iterations
先看下圖:
首先這個1和5的數字input事實上不是100% linear separable,所以PLA永遠不會converge,我們設定一個iteration數量的上限,假設是1000次,取第一千次時的in sample error (Ein)的hypothesis當作final hypothesis function g。
此圖只是示意,因為現實中,不可能知道out of sample error是多少(test set不算嗎?),所以這是讓我們知道說,iteration下來,Ein的確很好的track Eout,兩者間的高度差就是epsilon。
這不是這1000次中的最佳解,其實可以永遠記錄比目前小的epsilon就好 :


看起來好一些了。
Linear Regression

regression就是real value output的意思,而其weights形式也是linear,也就是h(w)是線性的function。
regression跟classification不一樣的地方在於,classification明確知道正確與否,所以衡量error是簡單的binary value,但是regression就要定義什麼是好的in sample error Ein?
常見的in sample error是用squared error:

注意我們不知道f,但是我們知道f(xi),因為regression data一定有歷史資料yi,例如歷史房價,這就是f(xi)。
這是對單一input x在hypothesis h作用下,對所有in sample point來說,取其square error平均值代表in sample error整體error:

一個regression演算法就是要找出最小的in sample error的h。

2d feature vector (hyperplane is linear in 3d space):

Minimizing Linear Regression Ein
原本的Ein(h)寫成Ein(w):
如果把每一個xn vector全部放入一個matrix的每個row,並且把所有yn放入一個matrix:

Xw - y是一個vector,而且vector norm的定義如下:

所以我們可以重新表達Ein(w)用vector form:

平方用來抵銷norm的根號,北七ㄌ,就是一個簡寫而已,搞好久。
所以我們找出w使得Ein(w)最小:

此時X和y都是常數,實務上就是training set X和training set label y。
寫成vector form好處就是找出最小值的過程中,需要微分matrix,這簡單很多:

X上的十字符號稱為X-dagger,稱為pseudo-inverse,因為X-dagger * X = I
psuedo-inverse有很多numeric library可以解決,我們是幾乎不用也不該自己去implement。
這是computational approach,不用經過iteration去收斂,不過有一個先決條件就是:X^T*X要有inverse,不過幸好在real world data invertible的機率趨近於100%,因為#@$#$#@$,好吧他解釋的我聽不懂 XD。
所以基本上只要有X和y就可以做出linear regression:

如果data non-linear separable?
一個可能性就是把data做transformation,例如2d-feature (x1,x2)變成 (x1^2, x2^2),有點像是變成從某個圓心測量每個點的距離,這樣transform過後的points是可能linear separable,當然這樣的nonlinear transformation不能改變h(w)的linearity,也就是w vector與h(w)必須保持線性關係:
相關筆記為polynomial feature transformation。
上面說到可以先做一個phi nonlinear transformation,把data轉到另一個feature space,然後可能可以apply linear models,不過我們終究是在原來的input space工作,所以再做一個inverse transformation (如果有的話)轉換回原本的input space:

詳細過程:
1. 單一input vector x (國民車)被nonlinear transformation phi轉換到z space (高階卡車)
2. 所有的x in x space都被phi轉換成z space中的點
3. 所有的y都不改變
4. training發生在z space,所以weight vector我們特別標注為w~ (w tilda),用來註明這是在transformed過的feature space z learning出來的weights:

5. final hypothesis function g 得在z space運算,所以任何input x得先轉換成z再apply g:
結論
Linear models被用來比喻是國民車,省油好開,但是不會有最佳體驗,不過值得在面對一個問題的時候,先嘗試看看能否達到可接受的方案,因為這是很經濟的選擇。豪車例如svm當然比linear models 性能與體驗更好,不過價格就是貴!
沒有留言:
張貼留言